Kalibracja wzorca częstotliwości
 Chciałbym zaprezentować prostą metodę kalibracji wzorca częstotliwości za pomocą innego referencyjnego wzorca oraz oscyloskopu dwukanałowego, na przykładzie kolejno rubidowego wzorca częstotliwości FE-5680A oraz skonstruowanego przeze mnie wzorca czasu i częstotliwości GPS typu NTF-1100 (link do instrukcji obsługi). Przy okazji można tą metodą dokonać precyzyjnego pomiaru odchyłki częstotliwości mierzonego wzorca. W dobie coraz tańszych wzorców $f$ synchronizowanych GPS nasuwa się pytanie o możliwość ich wykorzystania w domowych warunkach bez udziału drogich precyzyjnych komparatorów itp.
Chciałbym zaprezentować prostą metodę kalibracji wzorca częstotliwości za pomocą innego referencyjnego wzorca oraz oscyloskopu dwukanałowego, na przykładzie kolejno rubidowego wzorca częstotliwości FE-5680A oraz skonstruowanego przeze mnie wzorca czasu i częstotliwości GPS typu NTF-1100 (link do instrukcji obsługi). Przy okazji można tą metodą dokonać precyzyjnego pomiaru odchyłki częstotliwości mierzonego wzorca. W dobie coraz tańszych wzorców $f$ synchronizowanych GPS nasuwa się pytanie o możliwość ich wykorzystania w domowych warunkach bez udziału drogich precyzyjnych komparatorów itp.
Z faktu synchronizacji wzorca GPS wynika zerowy (jest to też wzorzec czasu), a w zakresie czasu pomiarowego bardzo mały dryf fazy. Gdyby było inaczej, stale rosłaby odchyłka jego fazy względem zegara GPS i po jakimś czasie taki wzorzec wypadłby z synchronizacji. Jednak nadal pozostają fluktuacje częstotliwości (krótkoterminowe drgania opisywane wariancją Allana) oraz czasu i niestety są one większe niż we wzorcach niesynchronizowanych z dwóch przyczyn: fluktuacji fazy sygnału radiowego docierającego do anteny GPS (okres tych fluktuacji sięga kilku minut) i wpływu PLL obejmującej swym działaniem pracę lokalnego oscylatora np. OCXO, tym większego, im m.in. mniejszą rozdzielczość ma przetwornik cyfrowo-analogowy (DAC) sterujący pracą OCXO. Dalej pokażę jak zmniejszyć wpływ tych fluktuacji na wynik pomiarowy.
Przedstawiona metoda nie będzie polegała na zliczaniu dudnień różnicy obu częstotliwości, gdyż obszarem naszego zainteresowania będą tak małe odchyłki częstotliwości, że w zasadzie nie będzie dochodziło do ani jednego takiego dudnienia. Dlatego też w artykule tym będę posługiwał się raczej ściślejszym pojęciem wzorca $f$, zamiast ogólnego generatora. Oczywiście metoda będzie poprawna też w zakresie większych odchyłek $f$, ale wówczas lepiej zliczać dudnienia.
Metoda nie będzie się też opierała na krzywych Lissajous, gdyż nie działają one na przebiegach prostokątnych, co wyklucza niektóre wzorce np. telekomunikacyjne, a ponadto trudniej z tych krzywych odczytać przesunięcia fazy lub czasu pomiędzy dwoma przebiegami.
Prezentowana metoda jest tyle prosta, co definicyjna. Do jednego synchronizowanego kanału oscyloskopu podłączamy wzorzec referencyjny, a do drugiego wzorzec mierzony lub kalibrowany. Następnie obserwujemy wzajemne płynięcie obu przebiegów jako prędkość tego płynięcia liczoną w $\text{s/s}$ (sekund na sekundę), a w praktyce w $\text{ns/s}$, co daje liczbę niemianowaną.
Podstawa
Jak wiemy, pulsacja przebiegu zmiennego to prędkość (częstotliwość) kątowa
$$\omega = {{\mathrm{d}\mathit{\Phi}} \over {\mathrm{d}t}} \tag{1}$$
Wyrażenie (1) jest wykorzystane w poniższym (2) na względną odchyłkę częstotliwości wzorca mierzonego względem referencyjnego
$$\delta = {{f-f_0} \over {f_0}} = {{\omega-\omega_0} \over {\omega_0}} = {{{{\mathrm{d}\mathit{\Phi}} \over {\mathrm{d}t}}-{{\mathrm{d}\mathit{\Phi}_0} \over {\mathrm{d}t}}} \over {\omega_0}} = {{\mathrm{d}} \over {\mathrm{d}t}} {{(\mathit{\Phi}-\mathit{\Phi}_0)} \over {\omega_0}} = {{\mathrm{d}} \over {\mathrm{d}t}} {{\Delta\mathit{\Phi}} \over {\omega_0}} \tag{2}$$
Również zgodnie z (1) różniczka ostatniego wyrażenia z (2) jest równa
$${{\Delta\mathit{\Phi}} \over {\omega}} = \Delta t \tag{3}$$
co po podstawieniu do (2) daje nam szukaną formułę na względną różnicę obu częstotliwości
$$\boxed{\delta = {{\mathrm{d}(\Delta t)} \over {\mathrm{d}t}}} \tag{4}$$
Zatem względna różnica obu częstotliwości jest równa prędkości wzajemnego płynięcia obu przebiegów na oscyloskopie.
Przykład 1: Na oscyloskopie w czasie $1\text{ s}$ zaobserwowano wzajemne odpłynięcie przebiegów o $20\text{ ns}$. Wynikająca z tego względna różnica obu częstotliwości $\delta = 20\text{ ns} / 1\text{ s} = 2 \times 10^{-8}$.
Przykład 2: Podczas $10\text{ min}$ obserwacji na oscyloskopie przebiegi rozpłynęły się o $60\text{ ns}$. Obliczenie daje $\delta = 60\text{ ns} / 600\text{ s} = 1 \times 10^{-10}$.
Sprawdźmy poprawność wzoru (4). Załóżmy, że występuje dudnienie obu częstotliwości $\Delta f = 1\text{ Hz}$, co zgodnie z definicją daje $\delta = {{\Delta f} \over {f_0}} = {{1\text{ Hz}} \over {f_0}}$ (lewa strona). Takie dudnienie powoduje też wzajemne rozpływanie się obu przebiegów w przeciągu $1\text{ s}$ o czas równy $T_0$, z czego wynika prędkość odpływania równa ${{T_0} \over {1\text{ s}}}$ (prawa strona).
Jeszcze prościej ogarnąć wzór (4) rozumując w kategoriach zegarowych. Jeśli coś w przeciągu doby śpieszy się o $1\text{ s}$, to każde dziecko powie, że to coś ma względną dokładność $1\text{ s} / 86400\text{ s} \approx 1 \times 10^{-5}$ :-)
Ważne jest, aby oscyloskop synchronizować do częstotliwości referencyjnej $f_0$. Wówczas płynięcie przebiegu mierzonego $f$ w lewo oznacza $f > f_0$, natomiast w prawo $f < f_0$. Podobnie odchyłka fazy ma znak dodatni dla odchylenia w lewą stronę, a ujemny w prawą względem przebiegu referencyjnego.
Jedną z zalet prezentowanej metody jest to, że w praktyce częstotliwość referencyjna $f_0$ może być wielokrotnością lub podwielokrotnością mierzonej $f$, gdyż w zasadzie interesuje nas czasowy (fazowy) punkt odniesienia, względem którego odmierzamy prędkość płynięcia przebiegu mierzonego. Będzie to dalej wykorzystane.
Wadą tej metody jest wzrastający czas trwania pomiaru wraz z wymaganą jego precyzją. Przykładowo odpłynięcie $10\text{ ns}$ w ciągu godziny daje nam $\delta = 2.8 \times 10^{-12}$. Wartość $10\text{ ns}$ nie została przytoczona tu przypadkowo, bowiem fluktuacje fazy (czasu) wzorców synchronizowanych GPS bywają właśnie na co najmniej takim poziomie i rosną 2–3 krotnie wraz z gorszym ustawieniem anteny i pogodą, co normalnie uniemożliwia wykonanie w przeciągu godziny pomiaru z dokładnością $10^{-12}$ (trzeba by wydłużyć czas jednego pomiaru do wielu godzin).
Regresja liniowa
Zamiast powyższej odmiany dwupunktowej, zastosujmy regresję liniową
$$\Delta t = At + B$$
np. metodą najmniejszych kwadratów, do zdjętych z oscyloskopu wielu punktów $(t, \Delta t)$, gdzie: $t$ – chwila pomiaru, $\Delta t$ – odchyłka obu przebiegów. Regresja ta pozwoli w przeciągu kilkudziesięciu minut wykonać rzetelny pomiar $\delta$ z dokładnością $10^{-12}$. W odmianie tej współczynnik $A$ jest szukaną względną odchyłką $\delta$, natomiast $B$ opisuje nieistotną wstępną odchyłkę fazy (wynika z tego nieistotność obu miejsc przebiegów, względem których dokonujemy pomiarów $\Delta t$, byle tylko nie ulegały one modyfikacji).
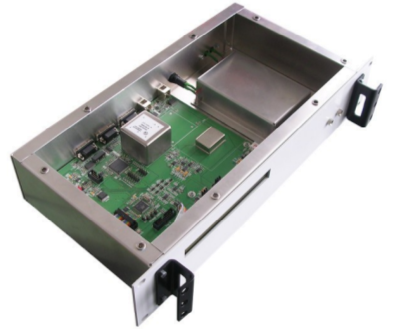
Metodę tę objaśnię na przykładzie rzeczywistych danych pomiarowych zdjętych podczas kalibracji wzorca $f$ rubidowego $10\text{ MHz}$ typu FE-5680A o 15-to minutowej wariancji Allana na poziomie kilku $10^{-13}$ oraz dokładności temperaturowej dochodzącej do $5 \times 10^{-11}$. Jako referencję wykorzystałem skonstruowany przeze mnie (hardware + software) wzorzec czasu i częstotliwości GPS Navitel NTF-1100 (rys. 1).

NTF-1100 jest wzorcem telekomunikacyjnym $2.048\text{ MHz}$ synchronizowanym z GPS (rys. 2), podczas pomiarów ustawiony na $2.5\text{ MHz}$, o 15-to minutowej wariancji Allana w stanie Locked (synchronizacja z GPS) w zależności od skonfigurowanej klasy dokładności od $7 \times 10^{-13}$ do $5 \times 10^{-11}$. W stanie Holdover (bez zasięgu GPS) dryf fazy wynosi odpowiednio $20\text{–}150\text{ ns/h}$. Zastosowałem w nim DAC o rzadko stosowanej rozdzielczości aż $20$ bitów. Odchyłkę czasu $\text{[ns]}$ pomiędzy dwoma egzemplarzami tego wzorca we wspomnianej najgorszej klasie dokładności przedstawia rys. 3.

Podczas pomiarów wzorca rubidowego wzorzec GPS pracował w najgorszej z wymienionych wyżej klas dokładności (na rys. 2 aktywne mniejsze OCXO). Nie stanowiło to problemu, gdyż znaczenie fluktuacji fazy zostanie dalej umniejszone regresją liniową, a co ważne jak wspomniałem, w stanie Locked wzorce GPS mają praktycznie zerowy długoterminowy dryf częstotliwości i fazy.
Fragment wstępnego etapu pracy NTF-1100 pokazuje poniższy film, na którym oscyloskop został zsynchronizowany wyjątkowo do wzorca rubidowego $10\text{ MHz}$ (sinusoida). Oscyloskop ma podstawę czasu $20\text{ ns/div}$.
Przystąpmy więc do pomiaru odchyłki i kalibracji częstotliwości wzorca rubidowego. Rys. 4 pokazuje dane pomiarowe (punkty) odchyłki fazy tego wzorca względem NTF-1100 zdejmowane co $2$ minuty przez godzinę oraz wynik regresji liniowej jako prosta
$$\Delta t = - (10.1\text{ p})t + 32.7\text{ n}$$
z której wynika
$$\delta = -10.1\text{ p} \approx -10^{-11}$$
Znak ujemny oznacza, że $f$ wzorca rubidowego jest za mała.

Źródłem widocznych fluktuacji fazy (punkty) jest jednak wzorzec GPS z niezbyt dobrze umieszczoną anteną (na parapecie okna), mimo bardzo dobrej pogody. Natomiast dryf fazy (stała tendencja zmian opisana nachyleniem $A$ prostej) pochodzi od wzorca rubidowego. Jak widać z rys. 4 stosowanie podstawowego dwupunktowego wariantu metody w wielu chwilach czasu np. w $2250$ sekundzie, dawałoby wręcz dezorientację, co wiele razy doświadczałem. Zastosowanie zaś regresji liniowej daje pewny wynik pomiarowy. Co więcej, z powyższego rysunku widać, że metoda regresji ma jeszcze duży zapas dokładności za godzinę czasu pomiarowego.
Dalsze kalibrowanie wzorca rubidowego napotkało trudność związaną z mechaniczną rozdzielczością wieloobrotowego potencjometru, który musiał sprostać niemałemu wyzwaniu nastawiania z dużą względną dokładnością $1/600$ pełnego zakresu obrotów, co przekładało się na bardzo małe kąty ok. $10^\circ$ obrotu (producent tego rubida podaje gradację płynnej regulacji $1 \times 10^{-11}$ i zakres $2 \times 10^{-9}$).
Mam nadzieję, że przedstawiona w tym artykule metoda przyda się użytkownikom wysokostabilnych generatorów częstotliwości.
Linki
Frequency Electronics – producent wzorca FE-5680A
Navitel – producent wzorca NTF-1100
STFS/GPS – wzorzec z Politechniki Poznańskiej
Instytut Tele- i Radiotechniczny w Warszawie – producent wzorca W7-GPS
Oferta Oscilloquartz wzorców synchronizowanych GNSS
Historia artykułu
2016-05-28: powstanie
2023-12-21: korekta i aktualizacja linków po przejściu z J3 na J5
Ilustracja wstępna artykułu powstała przy pomocy DALL-E
© Copyright Krzysztof Kolisz 2016